动作运动测量数据采集分析系统,18618101725(微信同),QQ:736597338 ,信箱slby800@163.com
美国motionmonitorTM 一站式动作实时捕捉与多源数据完全实时同步分析系统
-
●一套交钥匙3D动作与运动捕捉、分析系统,平台旨在分析各种动作与运动的所有方面
-
●集各家之长为我所用:支持并提供广泛市面上几乎所有动作、运动硬件
-
●能够将您的研究转化为您自己的临床、教学、人体工程学或运动应用
-
●全套、完整的多多尺度的生物力学研究和康复软件
-
●根据需求一站式灵活选配,满足各种运动与动作捕捉、监测、分析
-
●提供更加化、系统化的运动动作捕获分析数据(包括骨骼、肌肉、血管、神经以及外部刺激等)
-
●完整的一站式交钥匙3D动作捕捉分析系统:集成所有市面主流动作、运动硬件之长,系统化的数据深挖、分析、整合。
-
●支持从广泛的硬件(所有市面主流动作、运动硬件)进行实时采集。
-
●使用测力台、手传感器、EMG、眼动追踪、视频、EEG、虚拟现实、触觉和模拟数据同步采集运动数据,简化采集和分析。
-
●通过原始或处理数据的图形显示提供即时回放。
-
●无需编程工作——从设置到数据收集再到分析,操作可以通过单选按钮和下拉菜单完成。
-
●提供跨各种硬件系统的通用软件平台,可取各家之长、更高性价比。
-
●广泛的功能和能力的多样性,支持各种应用程序。
-
●市场上的数据采集、分析和可视化系统可测量人体运动、动作的所有方面。
基础硬件:motionmonitor可集成各种捕捉硬件的系统装置及完全同步采集分析多源数据的软件
支持各种捕捉技术:确保技术性价比
支持各种外围设备:实现人体动作捕捉分析所有方面
一站交钥匙式服务:避免处理多个供应商的麻烦,MotionMmonitor支持团队一键式呼叫将解决硬件和软件相关问题:
1、生物力学与生命科学
二、神经科学与运动控制
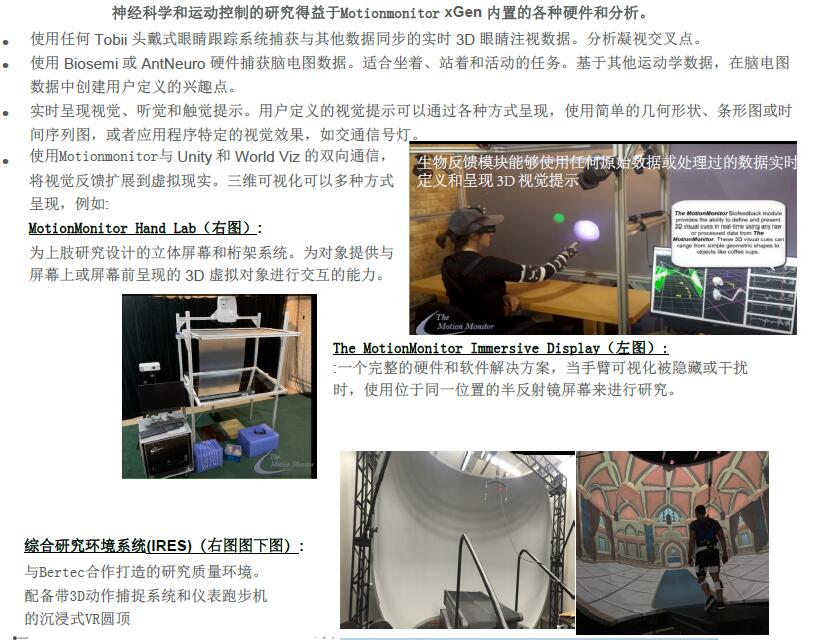
三、康复与人体工程学:

我们的方案装置可以协助师、运动训练师和人体工程学专家进行评估、筛查和再培训:
实时信息提供了评估绩效并向工作人员或患者提供即时反馈的能力。
同步的外围数据,例如 EMG 和测力台,允许对可能导致运动的其他因素进行运动学之外的研究。
用户定义的、图标驱动的界面为您独特的协议提供定制,以确保可靠和简单的数据收集和分析。
实时生物反馈和虚拟现实,使用多种方式显示数据,将评估扩展到训练和行为改变。
原始的、处理过的或用户定义的数据允许评估康复技术或工作场所环境的有效性。可以立即生成自定义报告以与临床医生、风险管理人员和其他人共享此数据。
在数据收集过程中,可以跟踪、动画和分析真实的物体,例如工具或茶杯,以监控工人或患者与周围环境的互动。
定制的交钥匙解决方案,包括便携式系统,使用各种动作捕捉技术,允许在任何环境下收集数据。
四、运动生物力学
我们的方案装置通过许多独特的功能提供监控运动员和提高表现的能力,包括:
使用佳的运动跟踪技术来跟踪、动画和分析运动员的运动和运动对象,如高尔夫、击球、投球、网球、保龄球、骑自行车等。
执行运动特定分析以进行评估、筛选和重返赛场。
以各种方法访问和可视化数据,包括报告摘要、条形图和时间序列图、自定义动画和跟踪。
使用音频反馈为培训和性能增强提供实时反馈。使用虚拟现实扩展实时反馈,为运动员创造身临其境的体验。
使用我们的运动监视器特殊用途应用程序对特定运动或与运动相关的运动进行简化的数据收集和分析,例如:
运动监视器跳跃版: PT、AT 和教练的理想工具,可使用反向运动、深蹲或俯冲快速评估生物力学和神经肌肉性能。
棒球运动监视器:研究质量的动作捕捉解决方案,具有用于跟踪和分析球员投球和击球动作的简化流程。
更多详细配置方案,请咨询产品顾问:李经理,18618101725 
人体动作数据分析系统,三维动作捕捉系统,人身动作运动捕捉分析系统,人体运动测量数据采集分析系统,手法治liao运动动作测试分析系统,三维动作数据分析系统,运动多种生物力学建模系统,人身动作运动捕捉跟踪分析系统,动作捕捉多数据源整合分析,3D动作捕捉数据融合系统
1.2.1.1基于红外摄像头的光学步态捕捉
红外光学动作捕捉技术经历数十年的持续发展,目前常用的红外光学动作捕捉技术都是基于计算机视觉原理[4]。红外摄像头的光学步态捕捉主要分为被动式和主动式。被动式是在人体关键部位粘贴反光标记点,主动式是在人体主要部位佩戴上可发射红外线的主动式摄像头。本节主要说明被动形式的光学步态捕捉。在人体的主要骨骼部位以及关节处粘贴反光标记点,利用架设好的红外摄像头追踪反光标记点(Markers),从而计算出反光标记点在空间中的位置。反光标记点和红外摄像头分别如图1-1和图1-2所示。
1.2.1.2基于3D深度摄像头的动作捕捉
双目立体视觉即使用两个2D平面摄像头。两个平面摄像头获得两幅图像,通过两幅图像算出深度信息。飞行时间即由雷达芯片发射出红外激光散点,照射到物体后反射回雷达芯片的时间,由于光速已知,发射返回时间已知即可测量出摄像头距物体的距离, 。结构光是摄像头发出特定的图案,当被摄物体反射回这一图案时,深度摄像头再次接收这一图案,通过比较发射出的图案和接收的图案从而测量出摄像头距离被摄物体的深度信息。3D深度摄像头方案对比如表1-1所示。
利用结构光方案的产品有微软公司推出的Kinect,其广泛的应用在体感交互、人体骨架识别、步态分析等领域。
基本原理是首先找到图像中移动的物体,然后会对移动的物体进行深度评估,识别出人体的部位,然后将其从背景环境中分割出来。分割之后要做的工作就是模式匹配,将其匹配到骨骼系统上。算法流程如图1-7所示。
1.2.1.3基于2D摄像头的动作捕捉
惯性动作捕捉系统主要是将惯性传感器绑定在人身体主要骨骼上,如足、小腿、大腿,实时测量出每段骨骼的旋转,利用正向运动学(Forward kinematics,FK)和反向运动学(Inverse kinematics,IK)实时推导计算出整个人身体的运动参数。惯性动作捕捉系统的优势在于他是一种无源的动作捕捉系统,不需要借助任何外部信息,即不受外界环境的干扰。缺点则是由于惯性传感器普遍存在累计漂移会使惯性系统无法测量出运动的位移。其全身穿戴效果如图1-10所示。
惯性传感器主要包括加速度计、陀螺仪、磁力计。其中加速度计、陀螺仪、磁力计多采用MEMS形式,所以称之为MEMS惯性传感器。三轴加速度计可以测量载体的三个轴向上的加速度,是一矢量,通过加速度我们也可以计算出载体静止时的倾角。三轴陀螺仪可以测量出载体的三个轴向上角速度,通过对角速度积分我们可以得到角度, 。三轴磁力计可以测量出周围的磁场强度及与地球磁场的夹角。通过融合加速度、角速度、磁力值的数据我们可以精准的得到载体的旋转。融合后的数据一般用四元数或欧拉角来表示。其中四元数形式如 ,欧拉角包含俯仰角(Pitch)、横滚角(Roll)、偏航角(Yaw)。得到载体的旋转后再拟合各个骨骼的运动,从而计算出穿戴部位的运动姿态。通过对加速度、角速度的积分可以测量出穿戴者的步速、步距、步长等参数。上的MEMS惯性动作捕捉系统研发生产公司国外有荷兰Xsens、国内的北京孚心科技公司等。综述其原理如图1-11所示。
机械式动作捕捉依靠穿戴在人身体的机械装置来测量关节角度以及位移。人体运动带动机械装置的运动,从机械装置上的角度传感器可以知道运动角度,根据角度和机械部位的长度从而计算出移动位移。这一技术早出现在20世纪,由于机械结构的笨重,在步态分析方面机械动作捕捉早已退出发展的主流。但利用机械外骨骼的搬运发展成了主流。其形状如图1-12所示。
其他的技术路线还有基于声学式的动作捕捉,基于电磁式的动作捕捉等。