人体运动多数据源同步采集产品价格
人体运动多数据源同步采集,18618101725(微信同),QQ:736597338 ,信箱slby800@163.com
支持各种捕捉技术:确保技术性价比
支持各种外围设备:实现人体动作捕捉分析所有方面
一站交钥匙式服务:避免处理多个供应商的麻烦,MotionMmonitor支持团队一键式呼叫将解决硬件和软件相关问题:
典型应用简介:
1、生物力学与生命科学
全身动作运动捕获分析系统,Liberty 位置跟踪器同步数据采集分析系统,动作跟踪仪EMG EEG整合系统,不同运动力学系统互联互通整合,动作生物力学分析系统,人体运动多数据源整合分析,运动跟踪器EMG系统整合,运动学和动力学分析系统,动作所有数据同步分析系统,全身体动作运动抓取分析系统
二、神经科学与运动控制
三、康复与人体工程学:

我们的方案装置可以协助师、运动训练师和人体工程学专家进行评估、筛查和再培训:
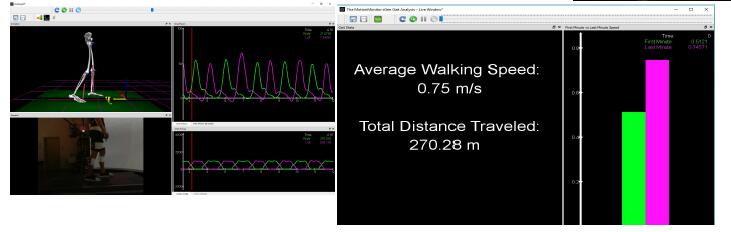
实时信息提供了评估绩效并向工作人员或患者提供即时反馈的能力。
同步的外围数据,例如 EMG 和测力台,允许对可能导致运动的其他因素进行运动学之外的研究。
用户定义的、图标驱动的界面为您独特的协议提供定制,以确保可靠和简单的数据收集和分析。
实时生物反馈和虚拟现实,使用多种方式显示数据,将评估扩展到训练和行为改变。
原始的、处理过的或用户定义的数据允许评估康复技术或工作场所环境的有效性。可以立即生成自定义报告以与临床医生、风险管理人员和其他人共享此数据。
在数据收集过程中,可以跟踪、动画和分析真实的物体,例如工具或茶杯,以监控工人或患者与周围环境的互动。
定制的交钥匙解决方案,包括便携式系统,使用各种动作捕捉技术,允许在任何环境下收集数据。
四、运动生物力学
我们的方案装置通过许多独特的功能提供监控运动员和提高表现的能力,包括:
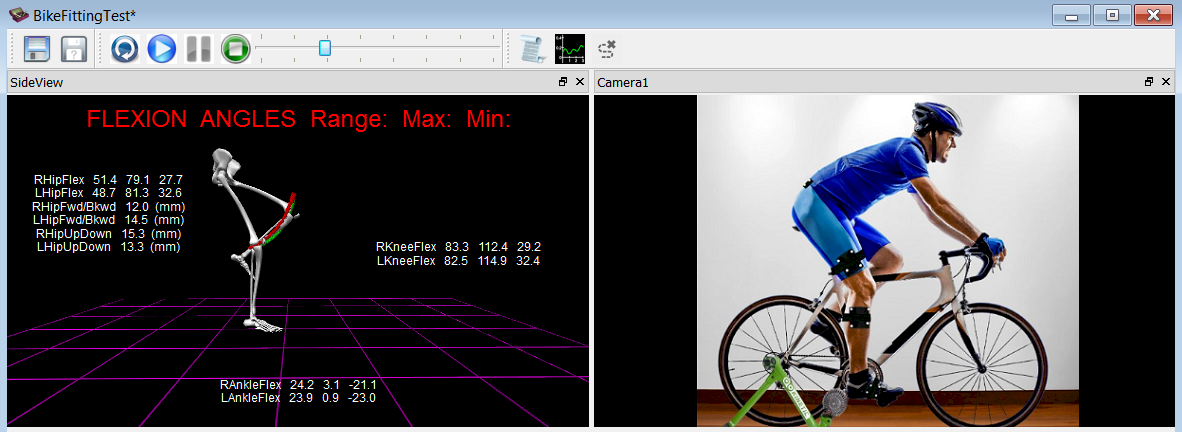
使用佳的运动跟踪技术来跟踪、动画和分析运动员的运动和运动对象,如高尔夫、击球、投球、网球、保龄球、骑自行车等。
执行运动特定分析以进行评估、筛选和重返赛场。
以各种方法访问和可视化数据,包括报告摘要、条形图和时间序列图、自定义动画和跟踪。
使用音频反馈为培训和性能增强提供实时反馈。使用虚拟现实扩展实时反馈,为运动员创造身临其境的体验。
使用我们的运动监视器特殊用途应用程序对特定运动或与运动相关的运动进行简化的数据收集和分析,例如:
运动监视器跳跃版: PT、AT 和教练的理想工具,可使用反向运动、深蹲或俯冲快速评估生物力学和神经肌肉性能。
棒球运动监视器:研究质量的动作捕捉解决方案,具有用于跟踪和分析球员投球和击球动作的简化流程。
更多详细配置方案,请咨询产品顾问:李经理,18618101725 
反光标记点既不会接收无线信号也不会向外发射任何无线信号,它的表面涂抹了一种特殊荧光材料,可以很好地让红外摄像头识别到并反射回高质量的图像信号。
计算机的上位机软件经过一系列的算法识别还原出人体的步态。
基于红外摄像头的光学步态动作捕捉系统优点是技术成熟度高,采样频率高,加之目前的高性能计算机数据处理速度*快所以延迟很低,且精度很高,使用范围广,应用领域众多。主要缺点是对光照特别敏感,不能在光变化较大的环境下使用,周围不能有和光学标记点相近的物体或光斑,所以光学步态捕捉一般只在室内使用。由于摄像头的视场角有局限性,且人在运动时有的标记点很容易受到其他物体及自身的遮挡,这就造成被遮挡部位数据的丢失。后期数据处理工作量很大,由于数据量大且需要处理丢失、跳帧等问题,需要较长的后期处理时间。缺点还在于需要架设相机,相机一般架设到钢架结构上,这就造成使用场景一般比较固定,不能轻易的挪动。一般的场景至少需要6个摄像头,如果需要追踪更大的场景,需要的摄像头数量高达几十个,且单个摄像头价格十分价贵,比如Vicon公司生产的单个摄像头价格高达十万元,这就造成红外光学式步态捕捉还是应用到科学研究方面,无法走进大众。
1.2.1.2基于3D深度摄像头的动作捕捉
随着3D深度相机技术的成熟,有许多研究者开始研究基于深度相机的动作捕捉系统[5][6]。3D深度摄像头与2D摄像头的区别在于,除了能够获取平面图像外还可以获得深度信息。3D深度技术目前广泛应用在人体步态识别、三维重建、SLAM等领域。目前主流的3D深度摄像头的技术路线有:(1)双目立体视觉;(2)飞行时间(Timeoffly,TOF);(3)结构光技术等。
双目立体视觉即使用两个2D平面摄像头。两个平面摄像头获得两幅图像,通过两幅图像算出深度信息。飞行时间即由雷达芯片发射出红外激光散点,照射到物体后反射回雷达芯片的时间,由于光速已知,发射返回时间已知即可测量出摄像头距物体的距离, 。结构光是摄像头发出特定的图案,当被摄物体反射回这一图案时,深度摄像头再次接收这一图案,通过比较发射出的图案和接收的图案从而测量出摄像头距离被摄物体的深度信息。3D深度摄像头方案对比如表1-1所示。
表1-1 3D深度摄像头方案对比
利用结构光方案的产品有微软公司推出的Kinect,其广泛的应用在体感交互、人体骨架识别、步态分析等领域。
利用2D摄像头实现3D运动轨迹的捕捉是目前的技术研究。2D摄像头即平面摄像头,没有深度信息。目前基于2D摄像头的动作捕捉主要采用卷积神经网路(CNN)将稀疏的2D人体姿态凸显检测的原理。但是此种捕捉方案需要长时间的运算,并不适合实时的运动分析,且输出精度低。基于2D摄像头的动作捕捉目前可以捕捉人体局部的运动姿态,且捕捉之间需要采集大量的数据样本作为训练数据集。2D摄像头在深度信息的预测上存在着偏差,任何一点错误的数据都会导致很大的偏差,稳定性*差。的挑战在于摄像头的遮挡以及快速的运动都是2D摄像头很难追踪到的。其优点在于不需要任何的穿戴,且所需要的2D摄像头触手可得,成本*低,这对大众化的应用是一个不错的选择。利用2D平面摄像头的姿态捕捉应用如图1-9所示。
1.2.1.4基于MEMS惯性传感器的惯性动作捕捉系统
基于MEMS惯性传感器的动作捕捉系统的步态分析有很大的优势,主要体现在由于惯性动作捕捉系统采用的是MEMS芯片,成本较低,每个芯片只需要十元左右,整套系统的价格在几万元级别。由于惯性动作捕捉系统是一种无源的系统,整套系统的重量在几千克的范围内,所以便于携带,且不需要架设繁杂的相机。惯性传感器只需要开机后就可以使用,没有繁杂的校准、标定等操作步骤,所以使用十分便捷。惯性动作捕捉系统不受使用环境的影响,不管在室内、还是室外都可以正常使用。 但是MEMS传感器的精度相比于光学动作捕捉系统来讲,精度较低,但对于大众人群已经完全满足其需求。由于MEMS式陀螺仪存在零偏且在动态情况下积分累计误差会随着时间的推移而产生较大的漂移。MEMS加速度计在不同的状态下也存在误差,特别是在高动态下。磁力计很容易受到强磁环境的干扰。但是这一系列的误差问题都可以通过算法来补偿。MEMS式惯性传感器补偿后的静态精度一般可达到:俯仰角/横滚角≤0.2°,偏航角≤1°;动态精度:俯仰角/横滚角≤0.5°, 偏航角≤2°,步态位移误差可达5%。已满足步态参数计算的精度要求。
1.2.1.5其他技术路线
机械式动作捕捉依靠穿戴在人身体的机械装置来测量关节角度以及位移。人体运动带动机械装置的运动,从机械装置上的角度传感器可以知道运动角度,根据角度和机械部位的长度从而计算出移动位移。这一技术早出现在20世纪,由于机械结构的笨重,在步态分析方面机械动作捕捉早已退出发展的主流。但利用机械外骨骼的搬运发展成了主流。其形状如图1-12所示。
其他的技术路线还有基于声学式的动作捕捉,基于电磁式的动作捕捉等。