批发全身动作运动捕获分析系统厂家
全身动作运动捕获分析系统,18618101725(微信同),QQ:736597338 ,信箱slby800@163.com
整合能力强、的实时3D运动捕捉分析系统,可集成各捕捉分析硬件,数据实时同步分析,用于涉及复杂运动分析的临床、生物力学、神经控制和运动医学应用。
使用该系统您可以集成各种硬件,并实时同步动作分析所有方面:
·自定义解决方案,以确保您实现研究目标......
确定哪种技术和配置对于您的独特需的
·集成市面上任何动作捕捉分析硬件,以利用每种技术的优势,确保性比价。
-
●一套交钥匙3D动作与运动捕捉、分析系统,平台旨在分析各种动作与运动的所有方面
-
●集各家之长为我所用:支持并提供广泛市面上几乎所有动作、运动硬件
-
●能够将您的研究转化为您自己的临床、教学、人体工程学或运动应用
-
●全套、完整的多多尺度的生物力学研究和康复软件
-
●根据需求一站式灵活选配,满足各种运动与动作捕捉、监测、分析
-
●提供更加化、系统化的运动动作捕获分析数据(包括骨骼、肌肉、血管、神经以及外部刺激等)
-
●完整的一站式交钥匙3D动作捕捉分析系统:集成所有市面主流动作、运动硬件之长,系统化的数据深挖、分析、整合。
-
●支持从广泛的硬件(所有市面主流动作、运动硬件)进行实时采集。
-
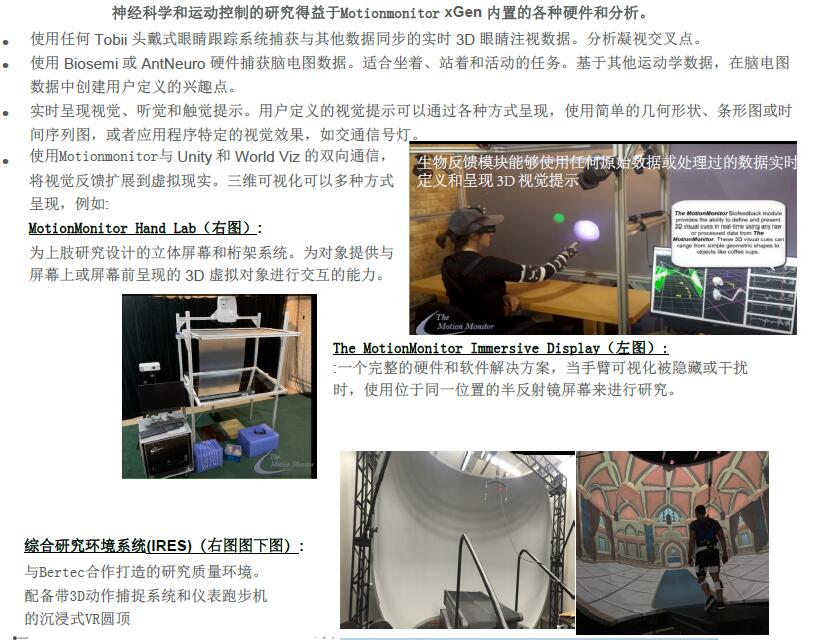
●使用测力台、手传感器、EMG、眼动追踪、视频、EEG、虚拟现实、触觉和模拟数据同步采集运动数据,简化采集和分析。
-
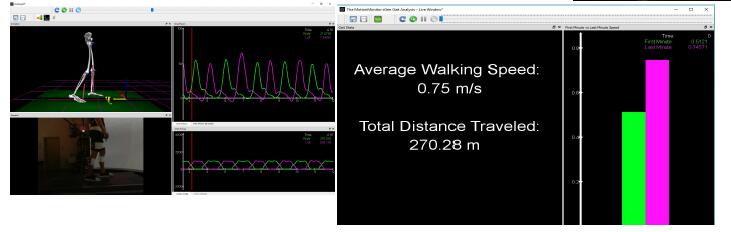
●通过原始或处理数据的图形显示提供即时回放。
-
●无需编程工作——从设置到数据收集再到分析,操作可以通过单选按钮和下拉菜单完成。
-
●提供跨各种硬件系统的通用软件平台,可取各家之长、更高性价比。
-
●广泛的功能和能力的多样性,支持各种应用程序。
-
●市场上的数据采集、分析和可视化系统可测量人体运动、动作的所有方面。
基础硬件:motionmonitor可集成各种捕捉硬件的系统装置及完全同步采集分析多源数据的软件
支持各种捕捉技术:确保技术性价比
支持各种外围设备:实现人体动作捕捉分析所有方面
一站交钥匙式服务:避免处理多个供应商的麻烦,MotionMmonitor支持团队一键式呼叫将解决硬件和软件相关问题:
典型应用简介:
1、生物力学与生命科学
二、神经科学与运动控制
三、康复与人体工程学:
基于红外摄像头的光学步态动作捕捉系统优点是技术成熟度高,采样频率高,加之目前的高性能计算机数据处理速度*快所以延迟很低,且精度很高,使用范围广,应用领域众多。主要缺点是对光照特别敏感,不能在光变化较大的环境下使用,周围不能有和光学标记点相近的物体或光斑,所以光学步态捕捉一般只在室内使用。由于摄像头的视场角有局限性,且人在运动时有的标记点很容易受到其他物体及自身的遮挡,这就造成被遮挡部位数据的丢失。后期数据处理工作量很大,由于数据量大且需要处理丢失、跳帧等问题,需要较长的后期处理时间。缺点还在于需要架设相机,相机一般架设到钢架结构上,这就造成使用场景一般比较固定,不能轻易的挪动。一般的场景至少需要6个摄像头,如果需要追踪更大的场景,需要的摄像头数量高达几十个,且单个摄像头价格十分价贵,比如Vicon公司生产的单个摄像头价格高达十万元,这就造成红外光学式步态捕捉还是应用到科学研究方面,无法走进大众。
目前市面上生产红外摄像头的光学步态捕捉的公司有英国的Vicon公司、美国NaturalPoint公司、美国MotionAnalysis公司、中国的青瞳视觉公司等。NaturalPoint公司生产的Optitrack系统如图1-5所示。
随着3D深度相机技术的成熟,有许多研究者开始研究基于深度相机的动作捕捉系统[5][6]。3D深度摄像头与2D摄像头的区别在于,除了能够获取平面图像外还可以获得深度信息。3D深度技术目前广泛应用在人体步态识别、三维重建、SLAM等领域。目前主流的3D深度摄像头的技术路线有:(1)双目立体视觉;(2)飞行时间(Timeoffly,TOF);(3)结构光技术等。
双目立体视觉即使用两个2D平面摄像头。两个平面摄像头获得两幅图像,通过两幅图像算出深度信息。飞行时间即由雷达芯片发射出红外激光散点,照射到物体后反射回雷达芯片的时间,由于光速已知,发射返回时间已知即可测量出摄像头距物体的距离, 。结构光是摄像头发出特定的图案,当被摄物体反射回这一图案时,深度摄像头再次接收这一图案,通过比较发射出的图案和接收的图案从而测量出摄像头距离被摄物体的深度信息。3D深度摄像头方案对比如表1-1所示。
以上三种方案的3D深度摄像头方案大部分用在娱乐级别方面,比如脸部识别解锁、人机互动,且由于其探测距离较近,很难用在大空间上。目前基于3D深度摄像头的芯片在不断地研究改进中。其硬件芯片仍是目前的难点,再其次是算法的复杂度,大量的图像计算对硬件的主控芯片的计算能力有较高的要求,在功耗上很难做到低功耗的工作,受制于目前的电池技术,单个传感器的工作时间比较短。其优势在于不需要用户穿戴任何传感器和粘贴标记点。利用Kinect进行人体下肢骨架识别如图1-8所示。
1.2.1.3基于2D摄像头的动作捕捉
利用2D摄像头实现3D运动轨迹的捕捉是目前的技术研究。2D摄像头即平面摄像头,没有深度信息。目前基于2D摄像头的动作捕捉主要采用卷积神经网路(CNN)将稀疏的2D人体姿态凸显检测的原理。但是此种捕捉方案需要长时间的运算,并不适合实时的运动分析,且输出精度低。基于2D摄像头的动作捕捉目前可以捕捉人体局部的运动姿态,且捕捉之间需要采集大量的数据样本作为训练数据集。2D摄像头在深度信息的预测上存在着偏差,任何一点错误的数据都会导致很大的偏差,稳定性*差。的挑战在于摄像头的遮挡以及快速的运动都是2D摄像头很难追踪到的。其优点在于不需要任何的穿戴,且所需要的2D摄像头触手可得,成本*低,这对大众化的应用是一个不错的选择。利用2D平面摄像头的姿态捕捉应用如图1-9所示。
1.2.1.4基于MEMS惯性传感器的惯性动作捕捉系统
惯性动作捕捉系统主要是将惯性传感器绑定在人身体主要骨骼上,如足、小腿、大腿,实时测量出每段骨骼的旋转,利用正向运动学(Forward kinematics,FK)和反向运动学(Inverse kinematics,IK)实时推导计算出整个人身体的运动参数。惯性动作捕捉系统的优势在于他是一种无源的动作捕捉系统,不需要借助任何外部信息,即不受外界环境的干扰。缺点则是由于惯性传感器普遍存在累计漂移会使惯性系统无法测量出运动的位移。其全身穿戴效果如图1-10所示。
惯性传感器主要包括加速度计、陀螺仪、磁力计。其中加速度计、陀螺仪、磁力计多采用MEMS形式,所以称之为MEMS惯性传感器。三轴加速度计可以测量载体的三个轴向上的加速度,是一矢量,通过加速度我们也可以计算出载体静止时的倾角。三轴陀螺仪可以测量出载体的三个轴向上角速度,通过对角速度积分我们可以得到角度, 。三轴磁力计可以测量出周围的磁场强度及与地球磁场的夹角。通过融合加速度、角速度、磁力值的数据我们可以精准的得到载体的旋转。融合后的数据一般用四元数或欧拉角来表示。其中四元数形式如 ,欧拉角包含俯仰角(Pitch)、横滚角(Roll)、偏航角(Yaw)。得到载体的旋转后再拟合各个骨骼的运动,从而计算出穿戴部位的运动姿态。通过对加速度、角速度的积分可以测量出穿戴者的步速、步距、步长等参数。上的MEMS惯性动作捕捉系统研发生产公司国外有荷兰Xsens、国内的北京孚心科技公司等。综述其原理如图1-11所示。
机械式动作捕捉依靠穿戴在人身体的机械装置来测量关节角度以及位移。人体运动带动机械装置的运动,从机械装置上的角度传感器可以知道运动角度,根据角度和机械部位的长度从而计算出移动位移。这一技术早出现在20世纪,由于机械结构的笨重,在步态分析方面机械动作捕捉早已退出发展的主流。但利用机械外骨骼的搬运发展成了主流。其形状如图1-12所示。