三维动作采集分析系统,18618101725(微信同),QQ:736597338 ,信箱slby800@163.com
使用该系统您可以集成各种硬件,并实时同步动作分析所有方面:
·自定义解决方案,以确保您实现研究目标......
确定哪种技术和配置对于您的独特需的
·集成市面上任何动作捕捉分析硬件,以利用每种技术的优势,确保性比价。
该系统是动作运动捕捉分析业界集成能力强的平台,包含但不于如下品牌:

- 美国Ascension的 trakSTAR位置跟踪器
- Polhemus 的 Fastrak位置跟踪器
- Polhemus 的Polhemus 的Patriot位置跟踪器
- Polhemus 的Liberty 位置跟踪器
- Polhemus 的G4位置跟踪器
- Motion Analysis Corp的Haw动作捕捉相机
- Motion Analysis Corp的Eagle动作捕捉相机
- Motion Analysis Corp的Osprey 动作捕捉相机
- Motion Analysis Corp的Kestrel 动作捕捉相机
- Qualisys 的 Oqus动作捕捉相机
- Qualisys 的 Miqus相机
- VICON 的 Vero相机
- VICON 的 Bonita相机
- VICON 的 Vantage相机
- VICON 的 T 系列相机
- VICON 的 MX 相机
- Natural Point 的 Optitrak Flex 动作捕捉相机
- Natural Point 的 OPrime 动作捕捉相机
- PhaseSpace 的 Impulse 和 Impulse2动作捕捉手套、相机和捕捉系统
- Phoenix Technologies Incorporated 的 Visualeyez 3D动作捕捉系统
- Northern Digital 的 Optotrak 3020 和 Certus
- Metria Innovation 的 MPT 莫尔相位跟踪系统
- Xsens惯性测量单元
- Delsys惯性测量单元
- APDM惯性测量单元
- InterSense惯性测量单元
- Bertec测力台
- AMTI 测力台
- Kistler 测力台
- Bertec仪表式楼梯
- AMTI 仪表式楼梯
-bertec仪表式跑步机(提供跑步机的实时动态控制)
-ATI微型称重传感器
-AMTI微型称重传感器
-Bertec 微型称重传感器
-
●一套交钥匙3D动作与运动捕捉、分析系统,平台旨在分析各种动作与运动的所有方面
-
●集各家之长为我所用:支持并提供广泛市面上几乎所有动作、运动硬件
-
●能够将您的研究转化为您自己的临床、教学、人体工程学或运动应用
-
●全套、完整的多多尺度的生物力学研究和康复软件
-
●根据需求一站式灵活选配,满足各种运动与动作捕捉、监测、分析
-
●提供更加化、系统化的运动动作捕获分析数据(包括骨骼、肌肉、血管、神经以及外部刺激等)
-
●完整的一站式交钥匙3D动作捕捉分析系统:集成所有市面主流动作、运动硬件之长,系统化的数据深挖、分析、整合。
-
●支持从广泛的硬件(所有市面主流动作、运动硬件)进行实时采集。
-
●使用测力台、手传感器、EMG、眼动追踪、视频、EEG、虚拟现实、触觉和模拟数据同步采集运动数据,简化采集和分析。
-
●通过原始或处理数据的图形显示提供即时回放。
-
●无需编程工作——从设置到数据收集再到分析,操作可以通过单选按钮和下拉菜单完成。
-
●提供跨各种硬件系统的通用软件平台,可取各家之长、更高性价比。
-
●广泛的功能和能力的多样性,支持各种应用程序。
-
●市场上的数据采集、分析和可视化系统可测量人体运动、动作的所有方面。
基础硬件:motionmonitor可集成各种捕捉硬件的系统装置及完全同步采集分析多源数据的软件
支持各种捕捉技术:确保技术性价比
支持各种外围设备:实现人体动作捕捉分析所有方面
一站交钥匙式服务:避免处理多个供应商的麻烦,MotionMmonitor支持团队一键式呼叫将解决硬件和软件相关问题:
典型应用简介:
1、生物力学与生命科学
我们的方案装置支持从骨科到运动机能学、运动科学、运动训练、力量与调节和运动医学的生命科学研究。功能包括:
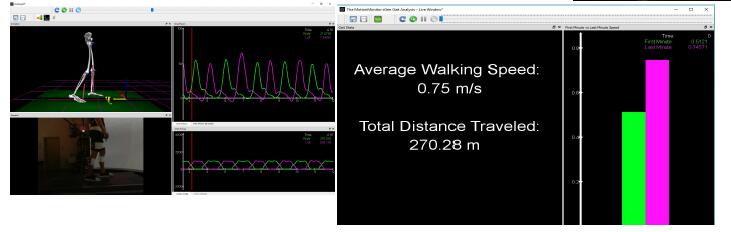
多种可视化方法,以有效的方式显示您需要的数据,包括文本;条形图或时间序列图;动画;或 3D 可视化。
无需编程即可从下拉菜单中获取原始和处理过的数据,例如运动学和动力学。用户定义的公式和脚本允许对步态分析、平衡、伸手和抓握等进行特定于应用程序的分析。
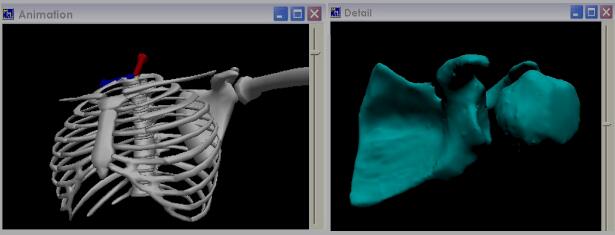
各种生物力学建模功能,包括自定义关节中心定义和局部坐标系的能力。支持标准方法,例如国际生物力学协会 (ISB) 的建议和用户定义的模型。可以跟踪、分析和可视化手、足和脊柱的各个骨骼。
CT-MRI 配准,用于创建具有特定主题骨骼几何形状的 3D 渲染。解剖标志可以从扫描中自动提取并用于定义生物力学模型。
集成肌肉建模,使用用户定义或导入的 OpenSim 模型,直接从运动捕捉数据中可视化和分析肌肉力和力矩。
支持多种运动捕捉技术,包括相机、惯性和电磁传感器。多种运动学技术可以组合成一个实时混合运动捕捉系统,以同时利用每种技术的优势。
二、神经科学与运动控制
神经科学和运动控制的研究受益于内置于我们方案的各种硬件和分析。
使用任何 Tobii 头戴式眼动追踪系统来捕捉与其他数据同步的实时 3D 眼动数据。分析视线交叉点。
使用 Biosemi 或 AntNeuro 硬件捕获 EEG 数据。适用于坐姿、站立和活跃的任务。根据其他运动学数据在 EEG 数据中创建用户定义的兴趣点。
实时呈现视觉、听觉和触觉提示。可以使用简单的几何形状、条形图或时间序列图或特定于应用程序的视觉效果(如红绿灯)以多种方式呈现用户定义的视觉提示。
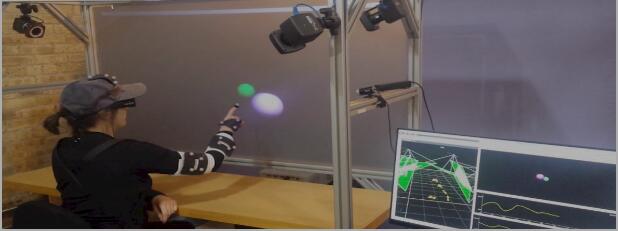
使用 监视器r 与 Unity 和 World Viz 的双向通信将视觉反馈扩展到虚拟现实。 3D 可视化可以以多种方式呈现。一些例子包括:
手部实验室:专为上肢研究设计的立体屏幕和桁架系统。为主体提供与屏幕上或屏幕前呈现的 3D 虚拟对象进行交互的能力。
沉浸式显示器:一个完整的硬件和软件解决方案,当手臂的可视化被隐藏或扰动时,使用同位半镜屏幕进行研究。
综合研究环境系统 (IRES):与 Bertec 合作创建的研究质量环境。配备带 3D 动作捕捉系统和仪表跑步机的沉浸式 VR 圆顶。
三、康复与人体工程学:
动作捕捉技术
计算机的上位机软件经过一系列的算法识别还原出人体的步态。
基于红外摄像头的光学步态动作捕捉系统优点是技术成熟度高,采样频率高,加之目前的高性能计算机数据处理速度*快所以延迟很低,且精度很高,使用范围广,应用领域众多。主要缺点是对光照特别敏感,不能在光变化较大的环境下使用,周围不能有和光学标记点相近的物体或光斑,所以光学步态捕捉一般只在室内使用。由于摄像头的视场角有局限性,且人在运动时有的标记点很容易受到其他物体及自身的遮挡,这就造成被遮挡部位数据的丢失。后期数据处理工作量很大,由于数据量大且需要处理丢失、跳帧等问题,需要较长的后期处理时间。缺点还在于需要架设相机,相机一般架设到钢架结构上,这就造成使用场景一般比较固定,不能轻易的挪动。一般的场景至少需要6个摄像头,如果需要追踪更大的场景,需要的摄像头数量高达几十个,且单个摄像头价格十分价贵,比如Vicon公司生产的单个摄像头价格高达十万元,这就造成红外光学式步态捕捉还是应用到科学研究方面,无法走进大众。
目前市面上生产红外摄像头的光学步态捕捉的公司有英国的Vicon公司、美国NaturalPoint公司、美国MotionAnalysis公司、中国的青瞳视觉公司等。NaturalPoint公司生产的Optitrack系统如图1-5所示。
双目立体视觉即使用两个2D平面摄像头。两个平面摄像头获得两幅图像,通过两幅图像算出深度信息。飞行时间即由雷达芯片发射出红外激光散点,照射到物体后反射回雷达芯片的时间,由于光速已知,发射返回时间已知即可测量出摄像头距物体的距离, 。结构光是摄像头发出特定的图案,当被摄物体反射回这一图案时,深度摄像头再次接收这一图案,通过比较发射出的图案和接收的图案从而测量出摄像头距离被摄物体的深度信息。3D深度摄像头方案对比如表1-1所示。
利用结构光方案的产品有微软公司推出的Kinect,其广泛的应用在体感交互、人体骨架识别、步态分析等领域。
基本原理是首先找到图像中移动的物体,然后会对移动的物体进行深度评估,识别出人体的部位,然后将其从背景环境中分割出来。分割之后要做的工作就是模式匹配,将其匹配到骨骼系统上。算法流程如图1-7所示。
1.2.1.3基于2D摄像头的动作捕捉
惯性动作捕捉系统主要是将惯性传感器绑定在人身体主要骨骼上,如足、小腿、大腿,实时测量出每段骨骼的旋转,利用正向运动学(Forward kinematics,FK)和反向运动学(Inverse kinematics,IK)实时推导计算出整个人身体的运动参数。惯性动作捕捉系统的优势在于他是一种无源的动作捕捉系统,不需要借助任何外部信息,即不受外界环境的干扰。缺点则是由于惯性传感器普遍存在累计漂移会使惯性系统无法测量出运动的位移。其全身穿戴效果如图1-10所示。
基于MEMS惯性传感器的动作捕捉系统的步态分析有很大的优势,主要体现在由于惯性动作捕捉系统采用的是MEMS芯片,成本较低,每个芯片只需要十元左右,整套系统的价格在几万元级别。由于惯性动作捕捉系统是一种无源的系统,整套系统的重量在几千克的范围内,所以便于携带,且不需要架设繁杂的相机。惯性传感器只需要开机后就可以使用,没有繁杂的校准、标定等操作步骤,所以使用十分便捷。惯性动作捕捉系统不受使用环境的影响,不管在室内、还是室外都可以正常使用。 但是MEMS传感器的精度相比于光学动作捕捉系统来讲,精度较低,但对于大众人群已经完全满足其需求。由于MEMS式陀螺仪存在零偏且在动态情况下积分累计误差会随着时间的推移而产生较大的漂移。MEMS加速度计在不同的状态下也存在误差,特别是在高动态下。磁力计很容易受到强磁环境的干扰。但是这一系列的误差问题都可以通过算法来补偿。MEMS式惯性传感器补偿后的静态精度一般可达到:俯仰角/横滚角≤0.2°,偏航角≤1°;动态精度:俯仰角/横滚角≤0.5°, 偏航角≤2°,步态位移误差可达5%。已满足步态参数计算的精度要求。
机械式动作捕捉依靠穿戴在人身体的机械装置来测量关节角度以及位移。人体运动带动机械装置的运动,从机械装置上的角度传感器可以知道运动角度,根据角度和机械部位的长度从而计算出移动位移。这一技术早出现在20世纪,由于机械结构的笨重,在步态分析方面机械动作捕捉早已退出发展的主流。但利用机械外骨骼的搬运发展成了主流。其形状如图1-12所示。